400万人が利用するビジネスSNS


東京
中途
オンライン面談OK
海外進出している
東京
中途
海外進出している
増岡 宏哉
国産ヒューマノイドの株式会社Highlanders CEO / 東北大学特任教授(客員)を兼任。 国プロ研究代表として、世界初の飛行中ドローンによる空中バッテリー交換技術を開発、国際特許を取得。 RENATUS ROBOTICS社の最高情報責任者として自動倉庫システム開発を牽引。 「拙速は巧遅に勝る」を合言葉に、誰よりも速くトライ・失敗・すぐに改善するスタイルを大切にしています。
株式会社Highlandersのメンバー
指名OK
増岡 宏哉
CEO
国産ヒューマノイドの株式会社Highlanders CEO / 東北大学特任教授(客員)を兼任。
国プロ研究代表として、世界初の飛行中ドローンによる空中バッテリー交換技術を開発、国際特許を取得。
RENATUS ROBOTICS社の最高情報責任者として自動倉庫システム開発を牽引。
「拙速は巧遅に勝る」を合言葉に、誰よりも速くトライ・失敗・すぐに改善するスタイルを大切にしています。
なにをやっているのか
Highlandersは、フィジカルAIを軸にヒューマノイドロボット・四足歩行ロボットの
ハードウェアからソフトウェアまで一気通貫で自社開発し、製造販売までを展開する東大発ロボティクススタートアップです。
フィジカルAIにおいて重要なのは、
アルゴリズムの賢さだけでなく、
・どのような身体構造・自由度を持つか
・どのような力学制約・外乱条件に置かれるか
・現実世界でどのように壊れ、どのようにメンテナンスを行うか
といった 「物理的な前提条件」そのものです。
Highlandersでは、AIとロボットハードウェアを高度に統合しながら、
・製造現場
・インフラ点検
・物流倉庫
・災害現場
といった 人手不足が深刻な現場で
実際に使われるフィジカルAIロボットを開発しています。
研究で終わらせず、
「現場で動く」「社会で使われる」ことを前提に
プロダクト開発から社会実装まで自社でやり切ることを大切にしています。





なにをやっているのか

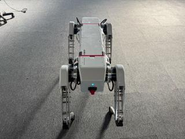
ヒューマノイドのプロトタイプ(初期)
4足歩行ロボット
Highlandersは、フィジカルAIを軸にヒューマノイドロボット・四足歩行ロボットの
ハードウェアからソフトウェアまで一気通貫で自社開発し、製造販売までを展開する東大発ロボティクススタートアップです。
フィジカルAIにおいて重要なのは、
アルゴリズムの賢さだけでなく、
・どのような身体構造・自由度を持つか
・どのような力学制約・外乱条件に置かれるか
・現実世界でどのように壊れ、どのようにメンテナンスを行うか
といった 「物理的な前提条件」そのものです。
Highlandersでは、AIとロボットハードウェアを高度に統合しながら、
・製造現場
・インフラ点検
・物流倉庫
・災害現場
といった 人手不足が深刻な現場で
実際に使われるフィジカルAIロボットを開発しています。
研究で終わらせず、
「現場で動く」「社会で使われる」ことを前提に
プロダクト開発から社会実装まで自社でやり切ることを大切にしています。
なぜやるのか

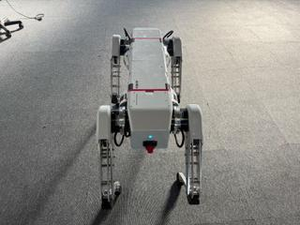
雪山での歩行実験

所沢開発拠点での作業の様子
日本は、世界でも稀有な製造業基盤とロボット技術を持つ国です。
フィジカルAI時代においてロボットの性能はアルゴリズム単体の賢さでは決まりません。
ロボットの身体設計
制御との相互作用
現場ごとの環境制約や運用条件
こうした ハードウェア・制御・現場適応力の総合力によって、
初めて実用的な価値が生まれます。
Highlandersは、
日本が本来強みを持つ
ロボット × 製造 × 現場力を基盤に、
フィジカルAIを産業として再構築することで、
再び世界で戦える国にする
その一端を担いたいと考えています。
どうやっているのか
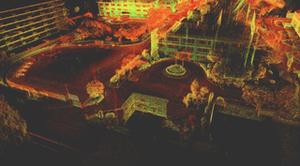
歩行ロボットで取得した点群によるマップ(SLAM)

新しいAIモデルの歩行実験失敗(転倒)
Highlandersの最大の特徴は、
ロボットハードウェアとAIの両方を自社で深く理解し、共に設計していることです。
機械・電気・制御・AI研究者が同じチームで議論し、設計する
シミュレーションだけでなく、
実機による失敗と改善のサイクルを超高速で回す
企業・省庁・研究機関と密に連携し、
実運用を前提とした検証を行う
歩行ロボットで取得した点群データによるSLAM、
新しいAIモデルの歩行実験での転倒や破損――
そうした「失敗」もすべて開発の一部です。
このサイクルを回し続けることで、「理論的に正しい」だけでなく
失敗から学び、現場で成立する本当に使えるフィジカルAI・ロボティクスを実現しています。
職種や立場を超えてフラットに議論し、
若手やインターンでも、
何度も失敗しながら開発の中核に関われる。
それがHighlandersのカルチャーです。
こんなことやります
◾️歓迎する経験・志向
人型ロボット・多脚ロボットの開発経験
ロボコン・ヒューマノイド系競技の経験
海外競技会(DARPA Robotics Challengeなど)への参加経験
学会・論文・研究ベースの議論ができる方
◾️環境
勤務地:所沢開発拠点
※実機を用いた開発が前提のため
原則出社となります。
設計 → 実装 → 実験 → 改善 のループを
自分の手で完結できる環境です。
◾️詳細
本ポジションでは、四足歩行ロボットおよびヒューマノイドロボットにおける
ロボットの身体構造・関節機構の設計を担うメカニカルエンジニアとして、研究開発に参加していただきます。
単なる機構設計ではなく、
歩行・着地・姿勢保持・外乱応答といった
動的な振る舞いを前提とした構造設計が求められます。
具体的には、ロボットが受ける荷重条件・イナーシャなどを整理し、
強度・剛性・重量のトレードオフを設計として落とし込んでいきます。
設計はCAD上で完結するものではなく、
実機の製作・組立・動作実験を通じて検証し、
得られた知見を次の設計へ反映させる
実機起点の研究開発サイクルを重視しています。
また、制御・AIエンジニアと密に連携しながら、
センサー配置や可動域、自由度構成といった
ロボット全体設計にも踏み込んだ議論を行います。
フィジカルAI時代において、
「どのような身体を持たせるか」は
知能の性能そのものを左右する重要な研究テーマです。
理論・解析・実装・実験を往復しながら、
世界水準の四足歩行・ヒューマノイドロボットを形にしていく。
本ポジションは、その中核を担う役割です。
◾️このポジションで得られるもの
四足歩行・ヒューマノイドという
最も難易度の高いロボット構造設計への挑戦
AI・制御・データ基盤と密接に連携した
フィジカルAI時代のメカ設計経験
研究で終わらない、
実社会に出るロボットの身体を設計する経験
「考えていた構造を、
本当に動くロボットとして成立させたい」
そんな方に、これ以上ない環境です。
3人がこの募集を応援しています
株式会社Highlandersの他の募集
- エンジニアリング
爆速面談|フィジカルAI × ロボット開発 オープンポジション
- AI/機械学習エンジニア
フィジカルAIでロボットを動かす|AIエンジニア
3人がこの募集を応援しています
話を聞きに行くステップ
- 応募する「話を聞きに行きたい」から応募
- 会社からの返信を待つ
- 話す日程を決める
- 話を聞きに行く
募集の特徴
オンライン面談OK
会社情報
2023/05に設立
31人のメンバー
- 海外進出している/
- 3000万円以上の資金を調達済み/
- 社長がプログラミングできる/
- 1億円以上の資金を調達済み/
東京都豊島区南大塚2丁目11−10 ミモザビル3F