
GitHub - Iruazu/mobility-ros2-firebase
Contribute to Iruazu/mobility-ros2-firebase development by creating an account on GitHub.
https://github.com/Iruazu/mobility-ros2-firebase.git

■ ロボティクスとの出会いと、1年目で得た実務経験
■ 個人開発プロジェクトの始まり
■ 0からMVPを作り、最初の設計転換へ
■ ROS2 × Web × Firebase の統合に挑戦
■ 「実機接続」で直面した限界
■ 個人開発の限界を越えるため、現場に飛び込む決意
■ 各種Link
大学入学後、私は知能ロボティクスに強い興味を持ち、授業内のロボット競技会を通して基礎的な制御や設計を学びました。
その後、担当教員の紹介で知能情報ロボティクス系の教授と面談する機会をいただき、大学1年生の期間は I-cart-mini の設計、Inventor を用いた3Dモデル作成、部品発注など、ロボット開発の入口となる実務的な作業を経験しました。
大学2年生の頃、趣味として続けていた AI Coding を使ったフルスタック開発 をロボティクスにも応用できないかと考えるようになりました。
研究室でも社会実装を見据えたモビリティプラットフォーム開発が進んでおり、その方向性と私の関心が一致。
「個人開発プロジェクトとして構築してみないか?」
という提案をいただき、ここから ロボティクス × クラウド の挑戦が本格的にスタートしました。
教授陣の構想をヒアリングし、自分で要件定義・仕様整理を行いながら、
まずは モビリティサービスのコア概念を検証するための MVP を作り始めました。
最初期は
「Web 上で経路入力 → Firebase に状態送信」
という最小構成のシミュレーションを構築し、データフローや操作概念の検証を実施。
しかし開発を進める中で、
という課題に直面しました。
この経験から
「サービスレベルのモビリティシステムには ROS2 が不可欠」
と判断し、プロジェクトの基盤を ROS2ベースの本格的なシミュレーション環境 へと転換しました。
次の段階では、
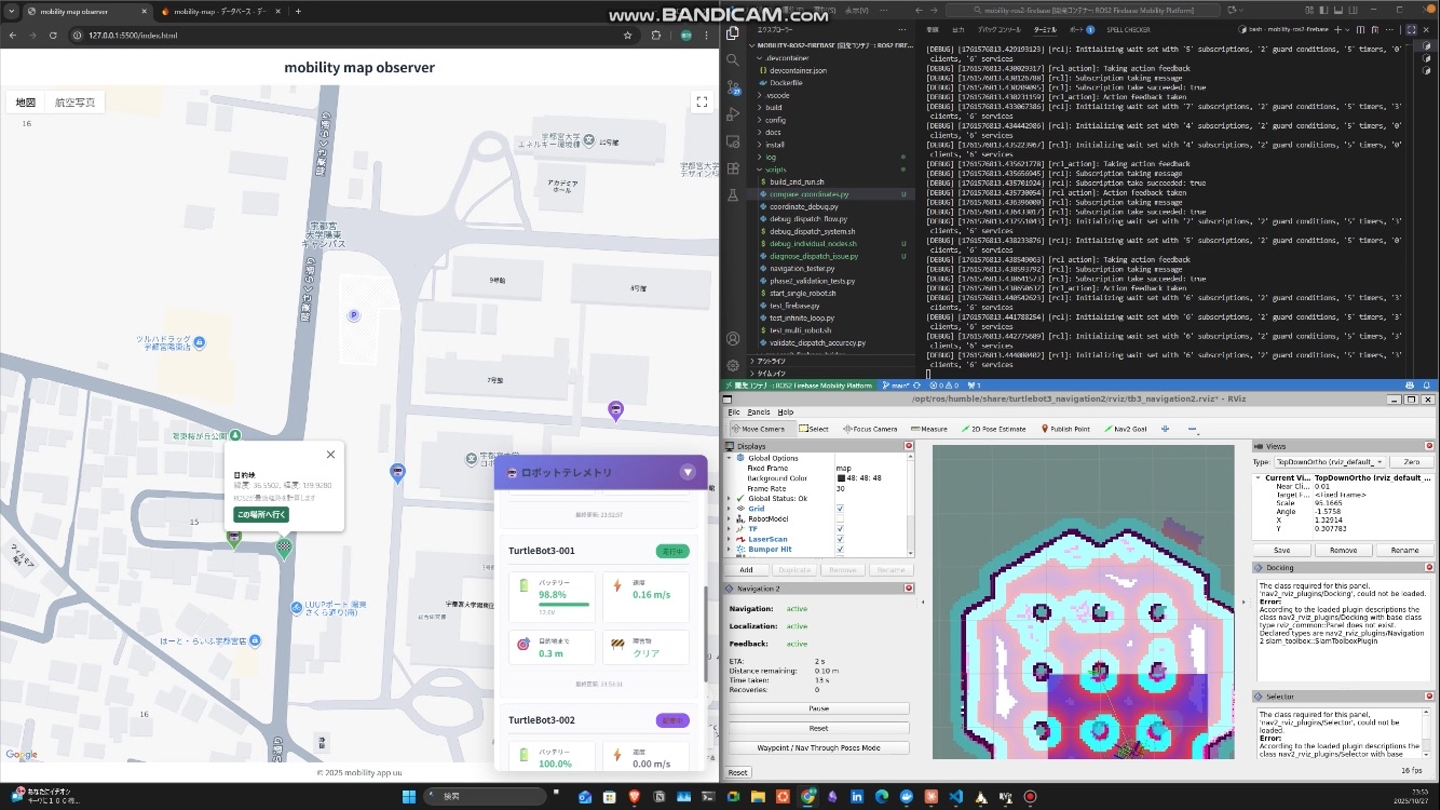
ROS2 Humble + TurtleBot3 を使った Webシミュレーション環境 を構築し、Nav2、GNSS、トピック通信、状態管理などを経験しました。
その過程で扱った技術は多岐にわたります。
開発過程では、AIに依存していたコーディングスタイルも見直し、
GitHub管理・動画デモ作成・LinkedInでの技術発信 といった活動へとつながりました。
シミュレーションの大枠が完成し、「次は実機接続だ」という場面まで到達しました。
しかしこの段階で、自分の実装力不足 を痛感しました。
クラウド連携、ROS2制御、センサ処理、リアルタイム通信など、
本番運用に近づくほど 個人開発では乗り越えられない壁 が明確になりました。
ROS2、Firebase、シミュレーションの統合を進めていく中で、
技術的に「自分だけでは越えにくい壁」が増えてきました。
特に、実機接続に踏み出そうとしたとき、
クラウド連携・制御・リアルタイム通信・センサ統合といった領域では、
実際の現場で使われている運用や設計の知見が不可欠であることを強く実感しました。
この経験を通して、
「学部生のうちに、実践的な開発環境に身を置いて成長したい」
という気持ちが明確になりました。
個人でROS2×Firebaseの基盤を組み上げたことで、
自分が伸ばすべきところや、もっと深く関わりたい領域が見えてきました。
今後、特に磨きたいのは:
こうした技術は、個人開発だけでは習得に限界があります。
だからこそ、実際のプロダクト開発の現場に身を置き、
経験を通して技術の幅と深さを広げたいと思っています。
現在は研究室での開発を一度区切り、
ロボティクス × クラウドの領域で、学生エンジニアとして挑戦できる環境を探して行動中です。
これまで培ってきた個人開発の経験を、
実際の現場での学びと組み合わせながら、
次のステージに進みたい——
その思いで、今の行動に踏み出しています。
[My Repository]
[Demo Video]


![]()

