大阪大学大学院 / 知能・機能創成工学専攻
RobocupSPL用自作サッカープログラム
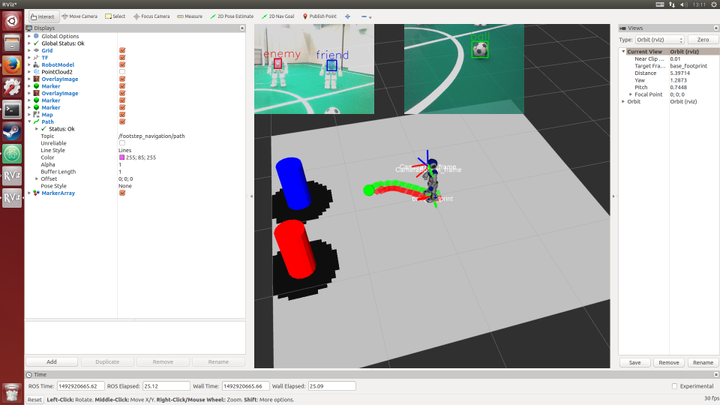
ロボカップに出場する為に作成したROSベースのサッカー用プログラムです。 フィールド上での自己位置推定機能やモーション再生、敵味方識別、ボール認識、GameControllerとの通信機能等があります。
400万人が利用するビジネスSNS
TierⅣ.inc / エンジニア
自分はMartime RobotX Challenge、Robocupサッカー標準プラトフォームリーグといったロボット競技会を通して技術を磨き、屋外でのロボットナビゲーションやサッカーフィールドでの自己位置推定等やボール等の画像認識にチャレンジしてきました。 その他にもROSに関して自分なりに勉強を進めプログラム(https://github.com/hakuturu583)や技術情
自分はヒューマノイド、自動運転といったロボット技術に興味があり、これまでもそういった分野を中心に協議会、勉強会等に参加して活動してきました。 今後自律機械の分野で世の中に革新を起こせるような技術を開発して行きたいと考えています。
ZETSというソフトロボットの制御に関する研究に従事した。 インターンシップにてROSを使い始め、今では毎日使用するように。 またロボカップ等に参加し実際にロボットを動かしその楽しさを実感した。
機械工学を専攻し、ZETSというソフトロボットを構成する空気圧柔軟アクチュエータの力学モデルと制御系の設計を行い卒業論文を執筆した。
大阪大学大学院 / 知能・機能創成工学専攻
ロボカップに出場する為に作成したROSベースのサッカー用プログラムです。 フィールド上での自己位置推定機能やモーション再生、敵味方識別、ボール認識、GameControllerとの通信機能等があります。