

北陸先端科学技術大学院大学|JAIST
NHK高専ロボコンで大賞受賞(写真はテストラン時)
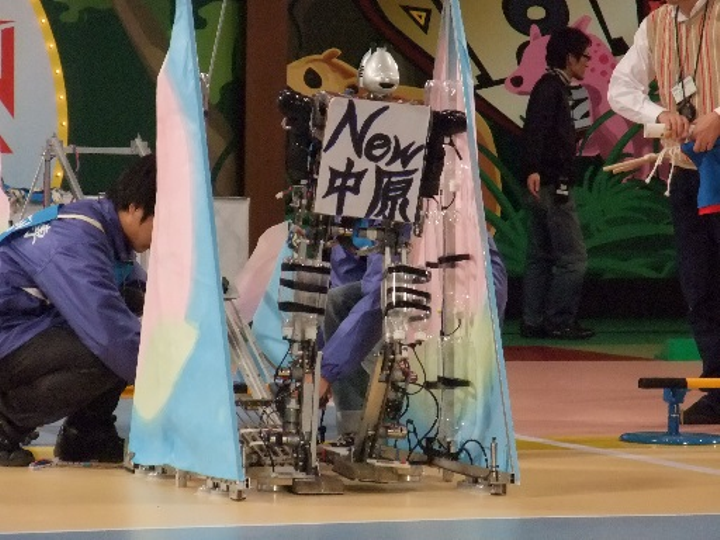
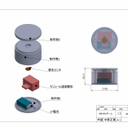
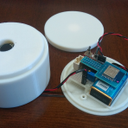
いかに観客を沸かせるか考え、同年北京オリンピックで注目された体操競技の鉄棒の大車輪を行う機能を実装した、人間に近い歩行を行う2足歩行ロボットを制作しました。 アイディア提案から技術的課題の解決、機械設計をメインに加工から組み立て、回路制作、配線、プログラミングなど、パワー回路設計を除くすべてに携わりました。 2足歩行ロボットが転倒しないように、足の裏に取り付けた吸盤によって競技フィールドに足が吸い付くようにしました。大車輪においては、ロボットの反動だけではなく鉄棒の軸を回転させることで、ロボットが大車輪を行うようにしました。