


千葉工業大学 / 未来ロボティクス学科
筋交い探査ロボット
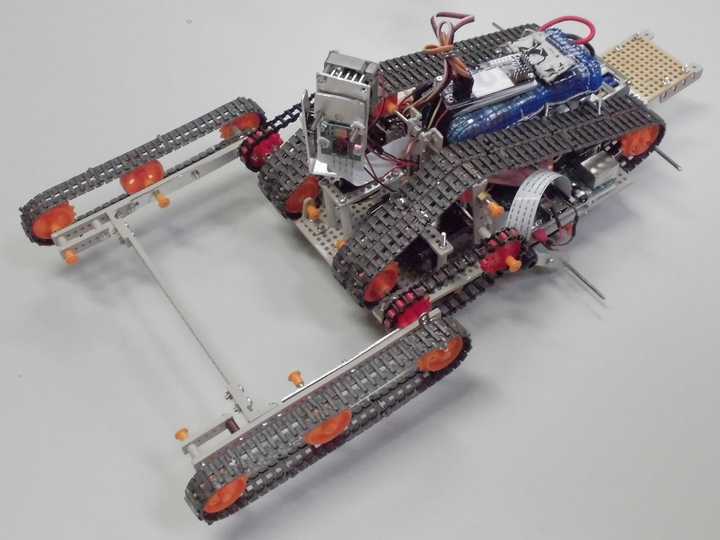
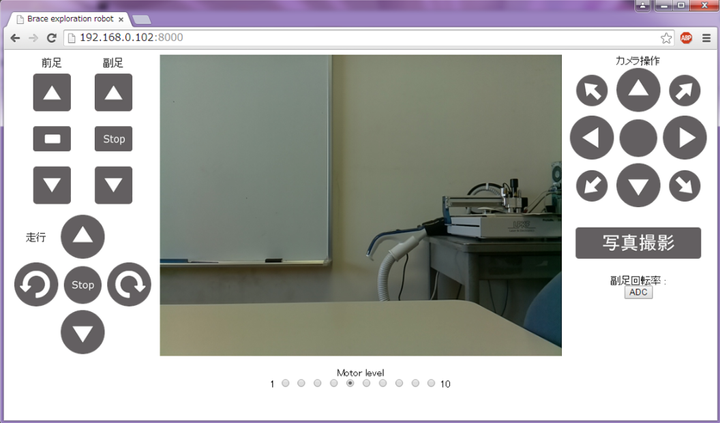
高校の課題研究にて制作した屋根裏の筋交いを確認するために作成したロボット メインボードはRaspberry Piを使用し,コントローラはブラウザ上で表示できるようにしたことによりどの端末でも操作できるようにした. 稼働時間は30分,段差は9.5cmまで,重量1.1kg 動画のは2014年10月ごろ時点のロボット
400万人が利用するビジネスSNS
千葉工業大学 / 工学部 未来ロボティクス専攻
千葉工業大学に2015年に入学,今も在学中. RoboCupに参加して自律型サッカーヒューマノイドの開発をしている,チームCIT Brainsの一員. 身体制御や強化学習の勉強をしており,また,それらを使った研究をしている.
この先もHumanoid Robotに関する研究に携わって行けたなと考えている. 強化学習を使用してHumanoid Robotのモーションの自動生成
千葉工業大学 / 未来ロボティクス学科
高校の課題研究にて制作した屋根裏の筋交いを確認するために作成したロボット メインボードはRaspberry Piを使用し,コントローラはブラウザ上で表示できるようにしたことによりどの端末でも操作できるようにした. 稼働時間は30分,段差は9.5cmまで,重量1.1kg 動画のは2014年10月ごろ時点のロボット